CMSC 5724 Data Mining and Knowledge Discovery - Lecture 06
- Review
- SVM problem
- Optimal Plane
- Approximate Plane
Review
用基于VC-dimension 来限定 generalization error,所以任何分割平面都有很小的 generalization error
definition plane 不够好,所以需要第二个theorem。第二个 theorem 表示,如果能够增加 margin,可以更好地限制 generalization error。
SVM problem
找到一个有着最大 margin 的分割平面。一个用来解决这个问题的算法叫做 “support vector machine”(SVM)
Optimal Plane
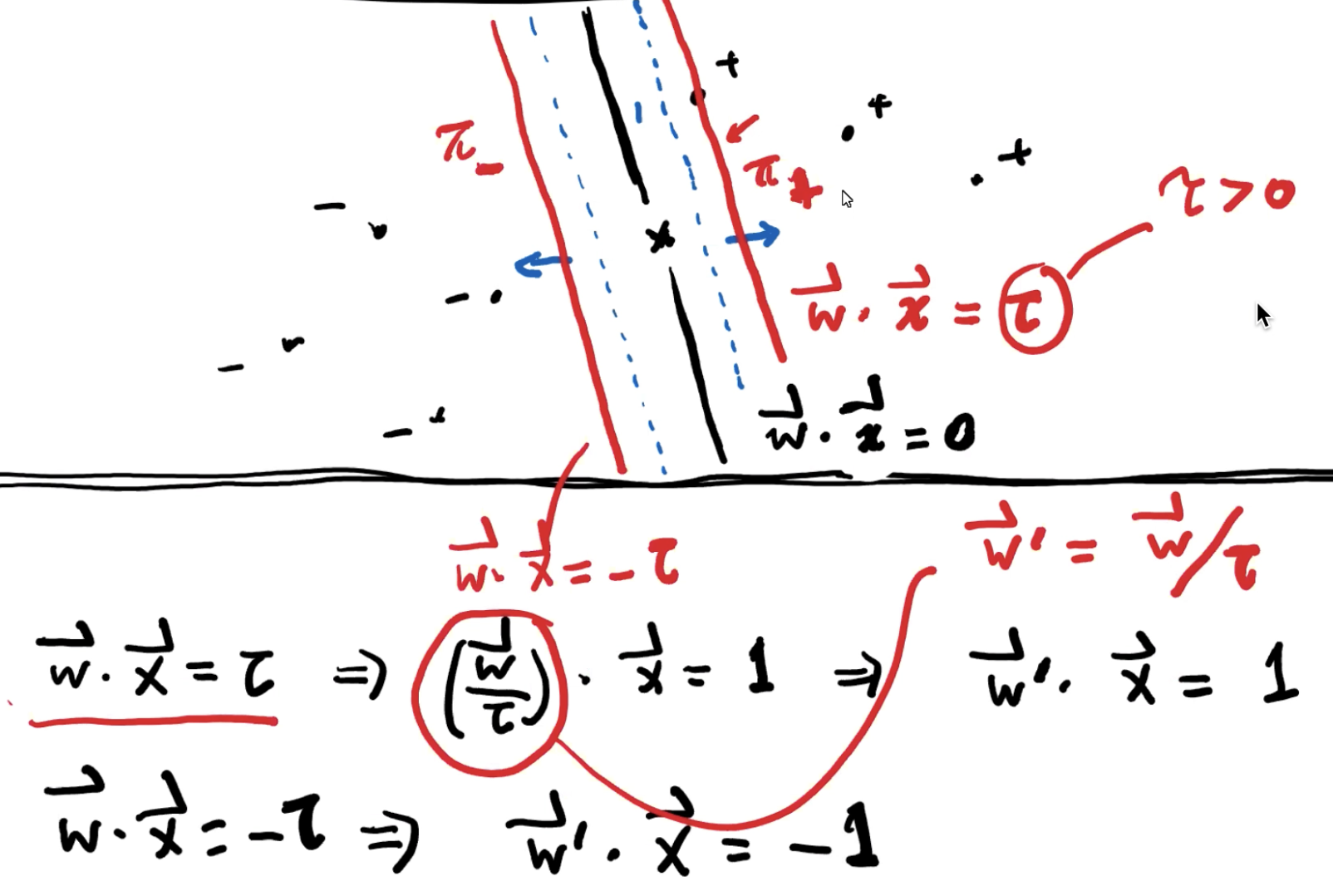
将过原点的分割平面复制两份,两个有相同的移动速度,一个向上平移,一个向下平移。一旦碰到一个 S 中的点就会停止。
distance between π- and π+
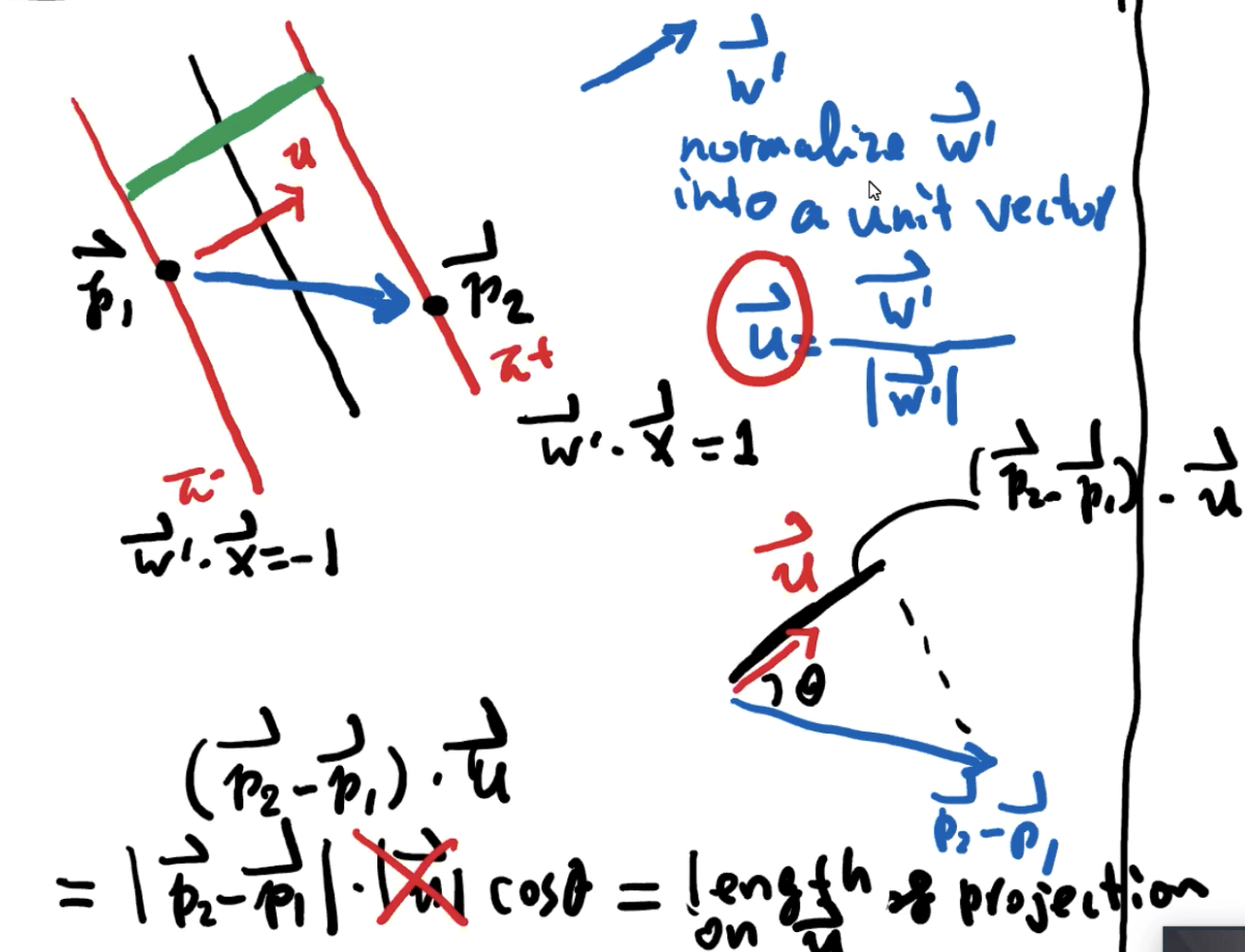
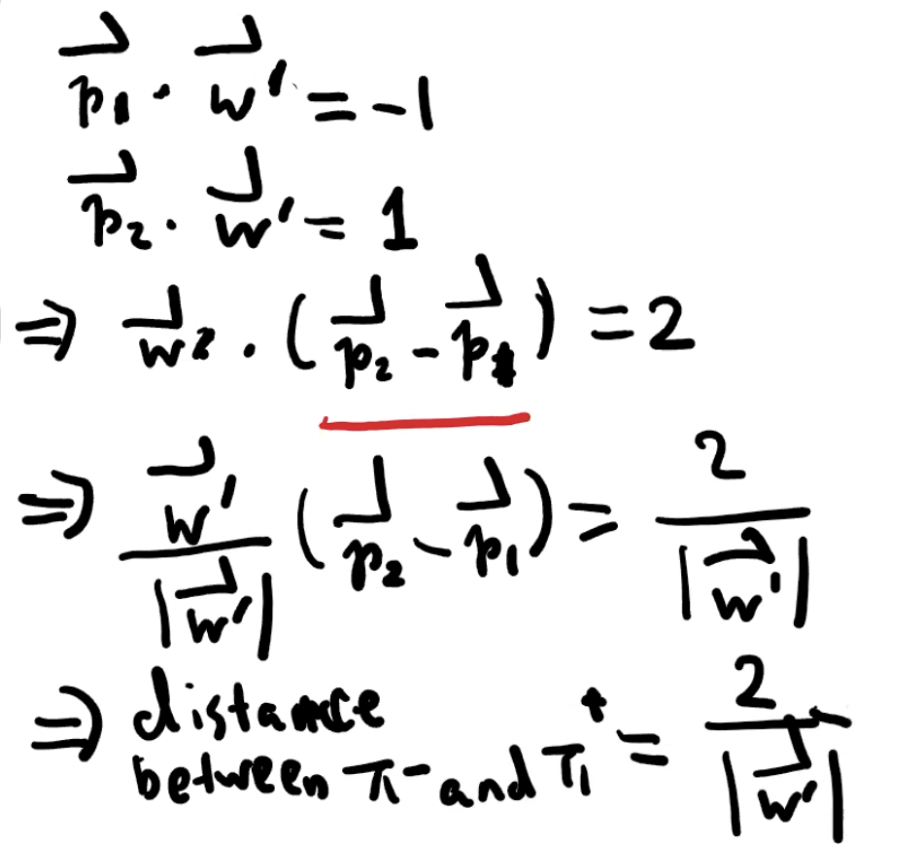
因此,分割平面的 margin w · x = 0 是 1 / |w|
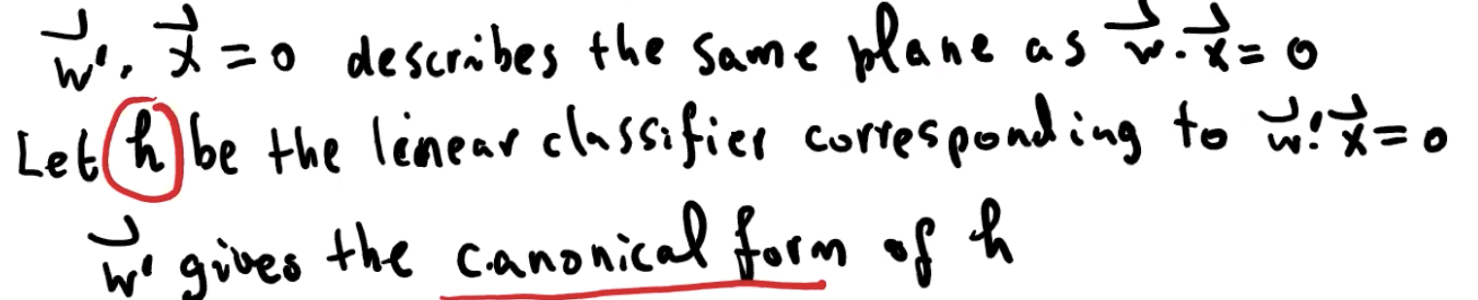
Approximate Plane
一个分割平面是由 w · x = 0 定义的,目标是去找到一个好的 w。我们仍然是使用 Perceptron,但是我们不仅是当点落在分割平面错误的一侧时会调整 w,也会在点过于靠近平面时进行调整。
现在,我们假设给定一个任意的值
点 p 导致 violation 的几种情况如下所示:
- 它与平面 w · x = 0 的距离小于
 ,无论它的 label 如何
,无论它的 label 如何 - p 的 label 是 1,但是 w · p < 0
- p 的 label 是 -1,但是 w · p > 0
Margin Perceptron
以 w = 0 开始迭代,在每次迭代中,找 violation porin p ∈ S。如果找到,那么算法会如下方式调整 w
- 如果 p 的 label 为1,则 w = w + p
- 否则,w = w - p
What if γguess > γ*?
有可能会停止,甚至2倍于 γ*,也有可能,不过概率会再低50%,如果3倍,那么几乎不可能。
Theorem
如果 γguess ≤ γ*,margin Perceptron 会终止在最多 次迭代,并且返回一个 margin 至少为
次迭代,并且返回一个 margin 至少为  的平面。
的平面。
Corollary
如果算法进行了 1 + R^2/γguess^2 次调整,那么 γguess > γ*
Proof
假设 γguess ≤ γ*
根据 theorem,算法应该调整次数 ≤ R^2 / γ*^2。
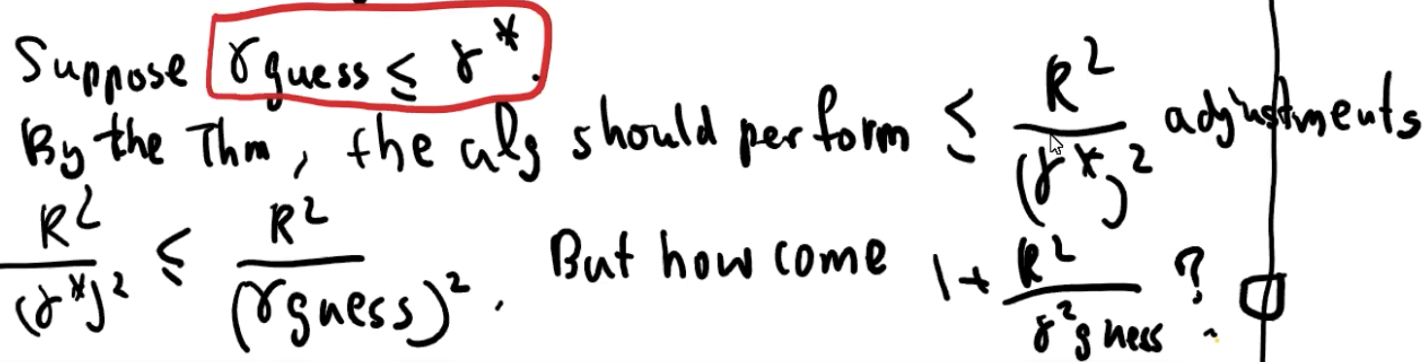
根据推论,就算你做了一些错误的做法,算法也不会永远迭代下去。因为如果一直迭代下去,会违反假设 γguess ≤ γ*
halving-technique
How to supply a guess value?
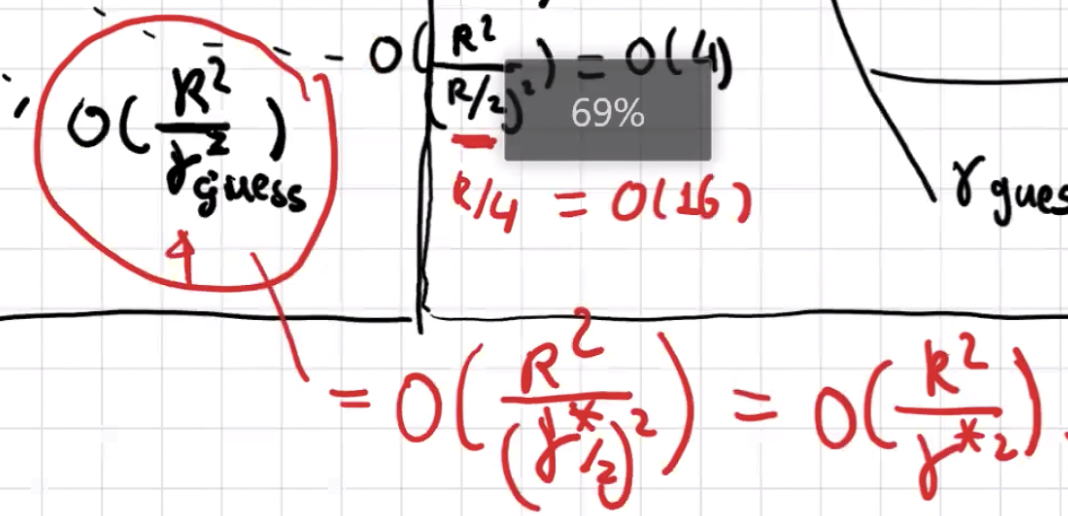
从一个很大的 γguess 开始,然后逐渐降低
Proof
Incremental Algorithm

然后重复这个过程。
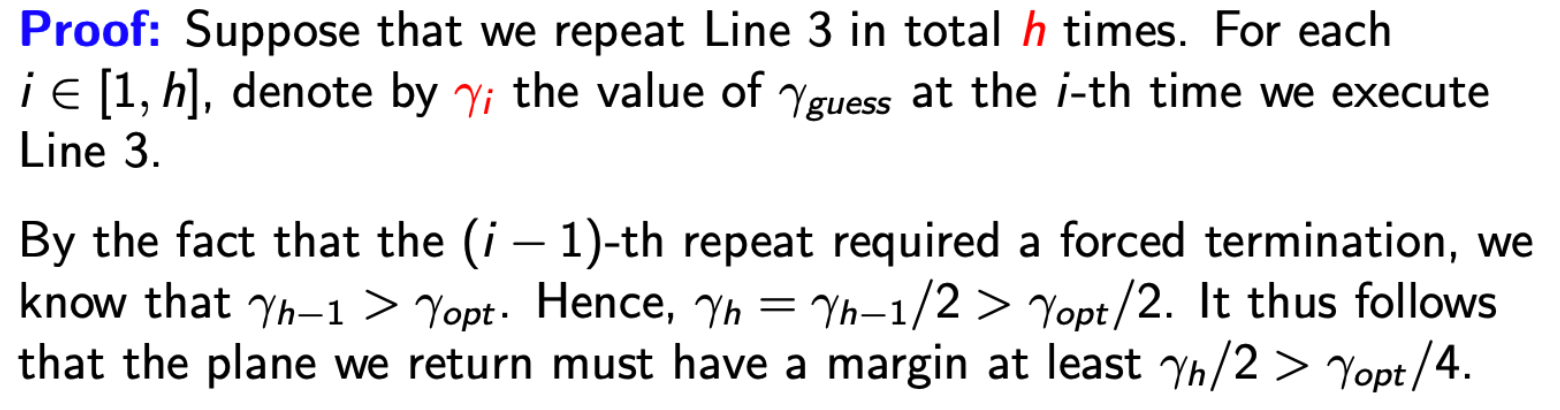
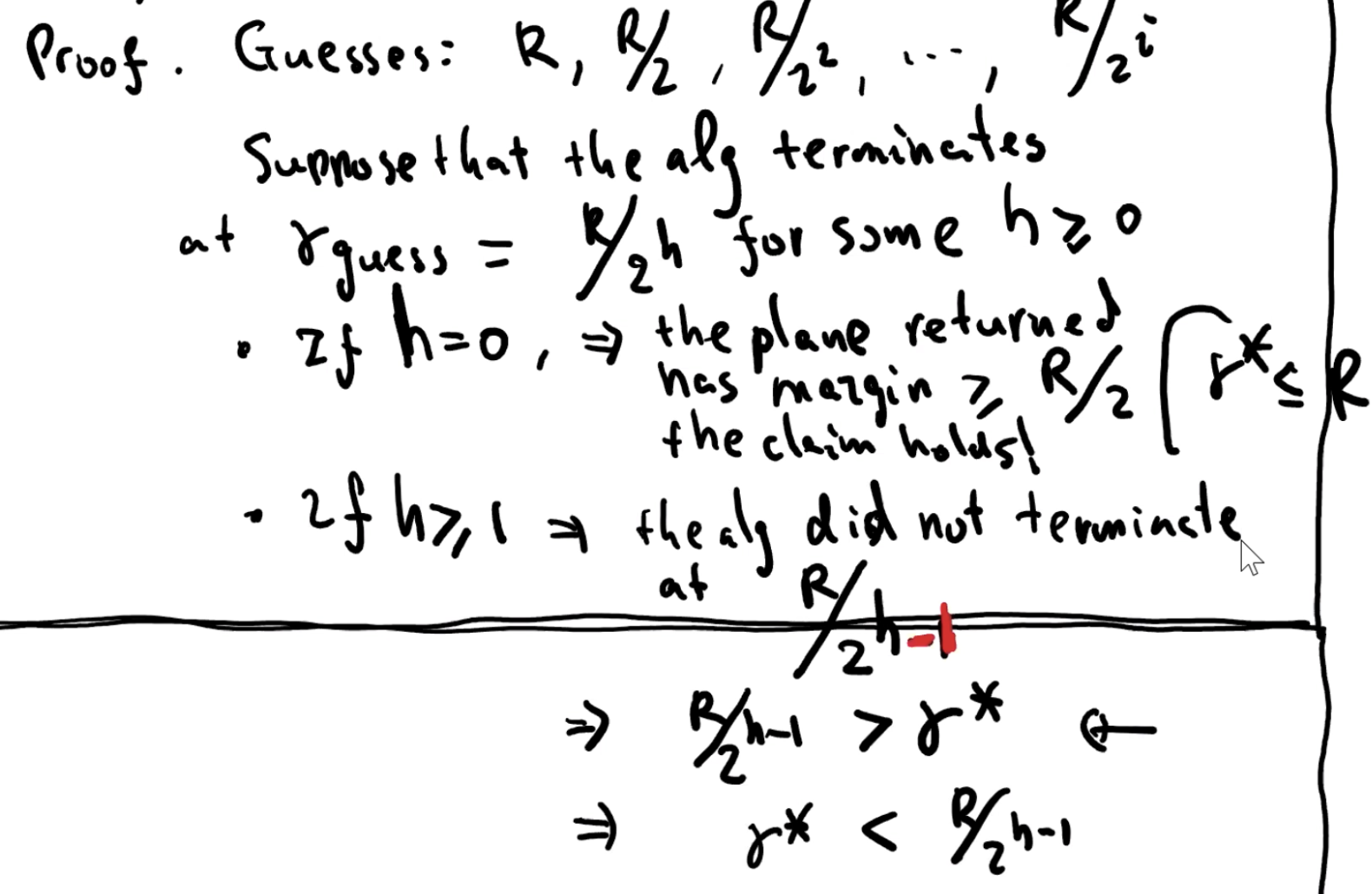
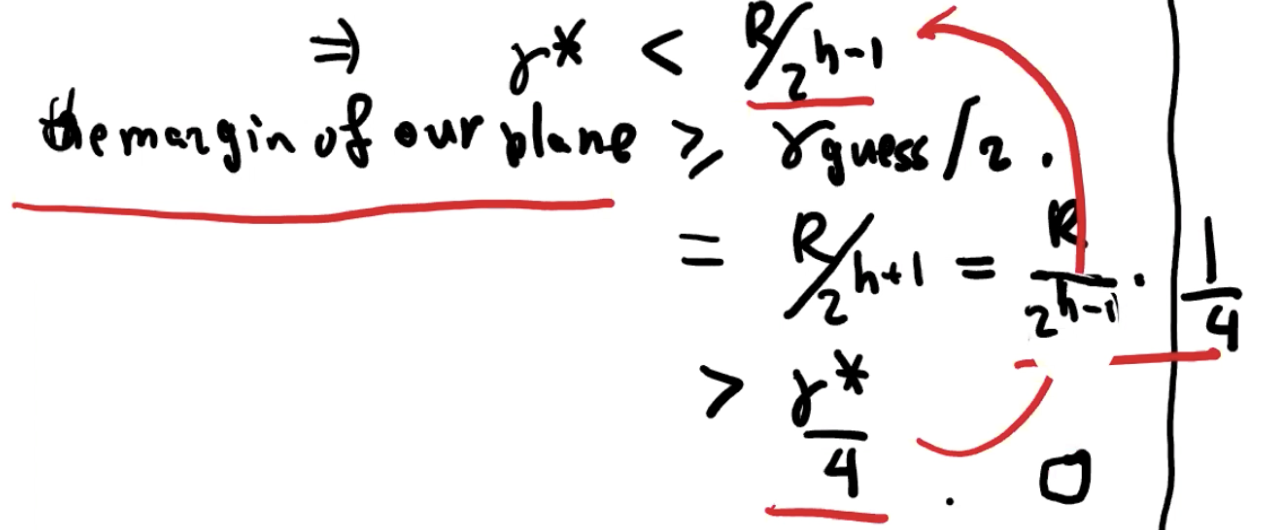
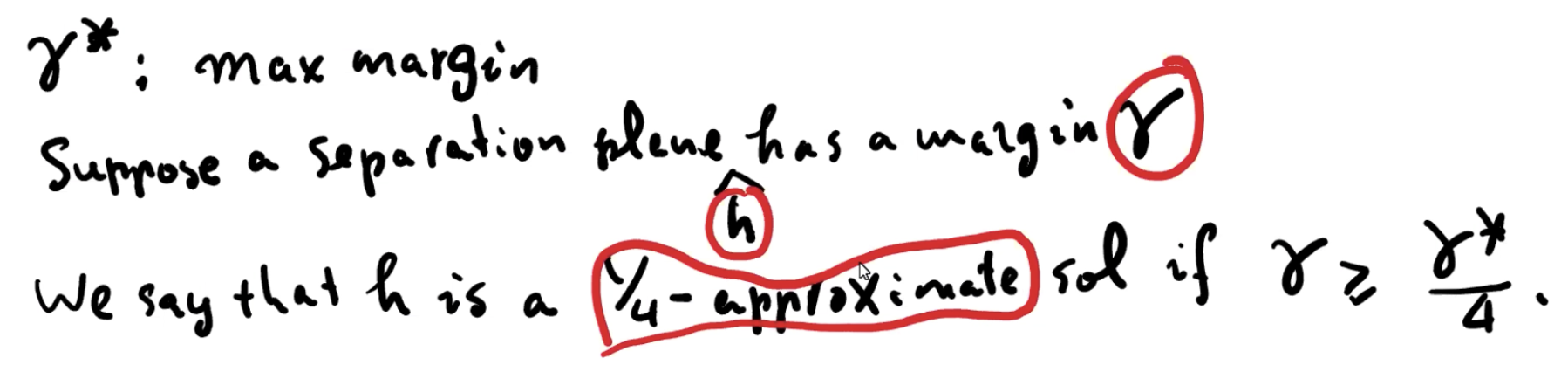
Theorem
- incremental algorithm 返回一个 margin 至少为 γ*/4 的分割平面。
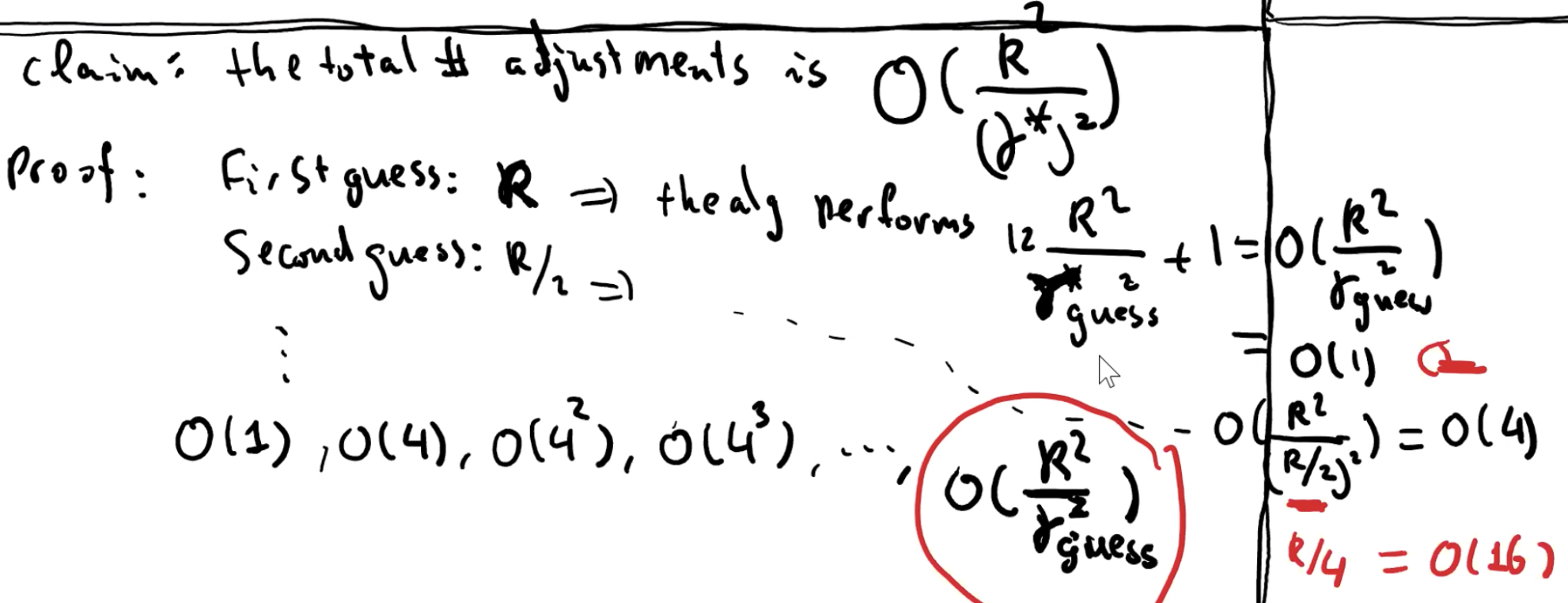
- 它总共会进行 O(R^2/γ*^2) 次迭代
Proof